Biography
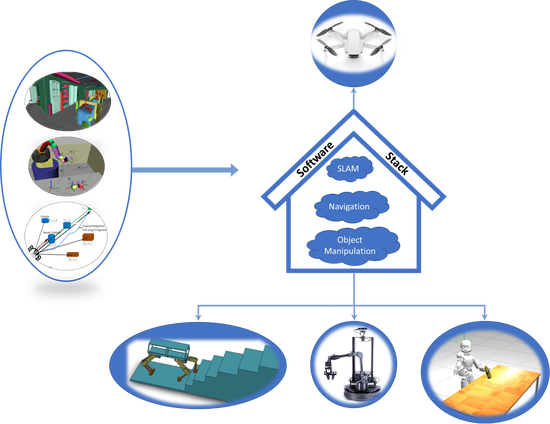
I aspire to become a full-stack roboticist to create multi-tasking robots that adapt to new environments and positively impact people’s everyday lives at homes and workplaces. I am particularly interested in tackling the challenges of deploying bio-inspired robots in the field and work towards a socially significant problem. In the long term, I hope to start my own company that uses field robotics to provide solutions to real-world problems such as search and rescue missions in complex environments.
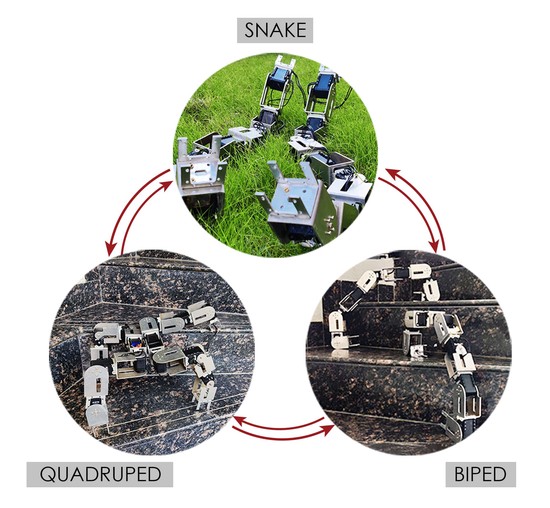
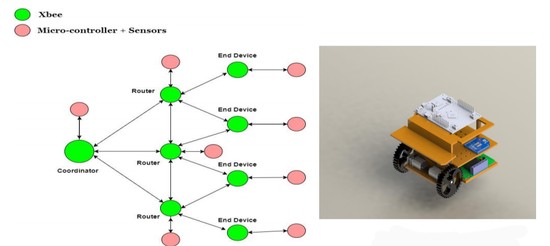
While completing my undergraduate degree, I worked with Dr. Shital Chiddarwar at IvLabs, the AI and Robotics Lab , on a variety of projects focused on creating innovative and robust hardware platforms. In addition to this work, I also led workshops for first-year students to foster a technical culture at my college.
Outside of work, I am a sports enthusiast and love adventure. I also enjoy listening to music and play tabla. On weekends I go running and biking, plan hikes, road trips, and organizes board game sessions and surprise people with my culinary skills!
Interests
- Field Robotics
- Bio-inspired Robotics
- Embedded Systems
- Sports
Education
-
Master of Science (M.S.) in Robotic Systems Development (MRSD), 2023*
Carnegie Mellon University
-
B.Tech. in Metallurgy and Materials, 2021
Visvesvaraya National Institute of Technology