Multi Agent Wireless Sensor Network
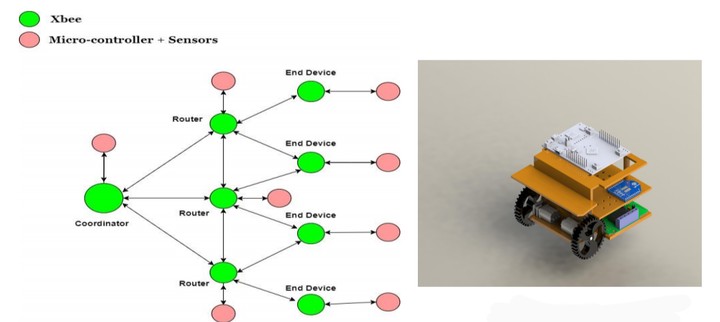 Wireless Network and CAD model of the robot used as testing platform.
Wireless Network and CAD model of the robot used as testing platform.
Abstract
Imitation of swarming behaviors of social animals offers a new way of designing systems due to simple rules, local interactions, robustness, scalability, and flexibility. Following this method, a swarm of multiple robots can cooperatively achieve a goal with collective intelligence. However, only a few such robotic systems are developed, and again very few are deployed outside of lab environments. The reason behind this is the lack of easy-to-deploy communication stack and a versatile library of essential swarm building functions from a hardware perspective. As a result, most researchers choose the option of simulation only. Hence in this article, we present an open source library integrated with a communication stack and tools which simplifies the process of hardware-level implementation of swarm algorithms. As the library presents multiple functions which are identified as basic building blocks of various swarm algorithms, it helps the user in creating future algorithms. Also, this library is open for collaborations from community and has a potential to become single solution for all swarm related applications.