Reconfigurable Quadrupedal-Bipedal Snake Robots (ReQuBiS)
 Reconfigurable Quadrupedal-Bipedal Snake Robots (ReQuBiS)
Reconfigurable Quadrupedal-Bipedal Snake Robots (ReQuBiS)
Abstract
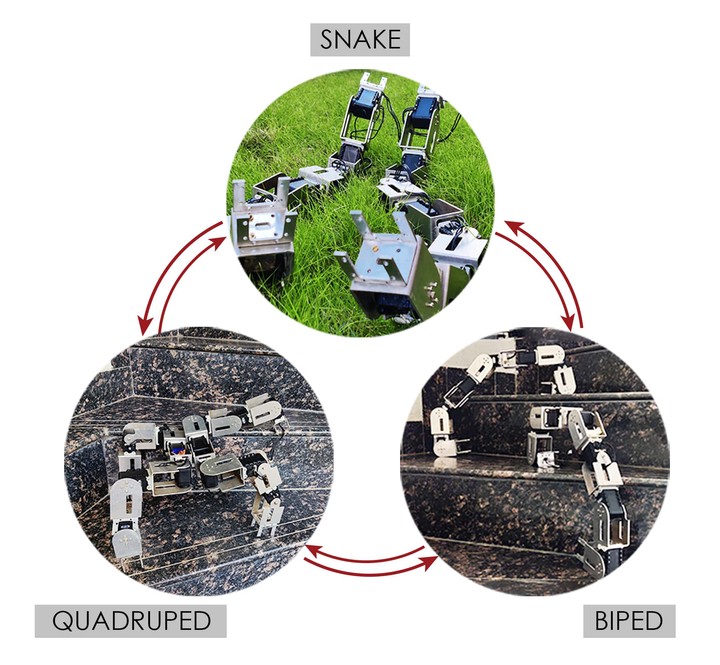
Selection of mobility modes for robot navigation consists of various trade-offs. Snake robots are ideal for traversing through constrained environments such as pipes, cluttered and rough terrain whereas bipedal robots are more suited for structured environments such as stairs. Finally, quadruped robots are more agile than bipeds and can carry larger payloads than snake robots but struggle to navigate through soft soil, sand, ice and constrained environments. A Re-configurable robot can achieve the best of all worlds. Unfortunately, state-of-the-art re-configurable robots rely on rearrangement of modules through complicated mechanisms to dissemble and assemble at different places which increases its size, weight and power (SWaP) requirements. We propose Re-configurable Quadrupedal-Bipedal Snake Robots (ReQuBiS) which is capable of transforming between mobility modes without any rearrangement of modules. Hence, requiring just a single modification mechanism. Furthermore, our design allows the robot to split into two agents to perform tasks in parallel for biped and snake mobility. Experimental results demonstrate these mobility capabilities in snake, quadruped and biped modes along with transition between them.